模型比較與學習總結
本系列從簡單手寫數字資料開始,逐步走到 SVHN 真實街景數字影像。這樣安排的目的,是讓我們先建立基本機器學習流程,再觀察資料複雜度提高後,不同模型能力的差異。
1. 模型結果總覽
| 階段 | 模型 | Train Accuracy | Test Accuracy |
|---|---|---|---|
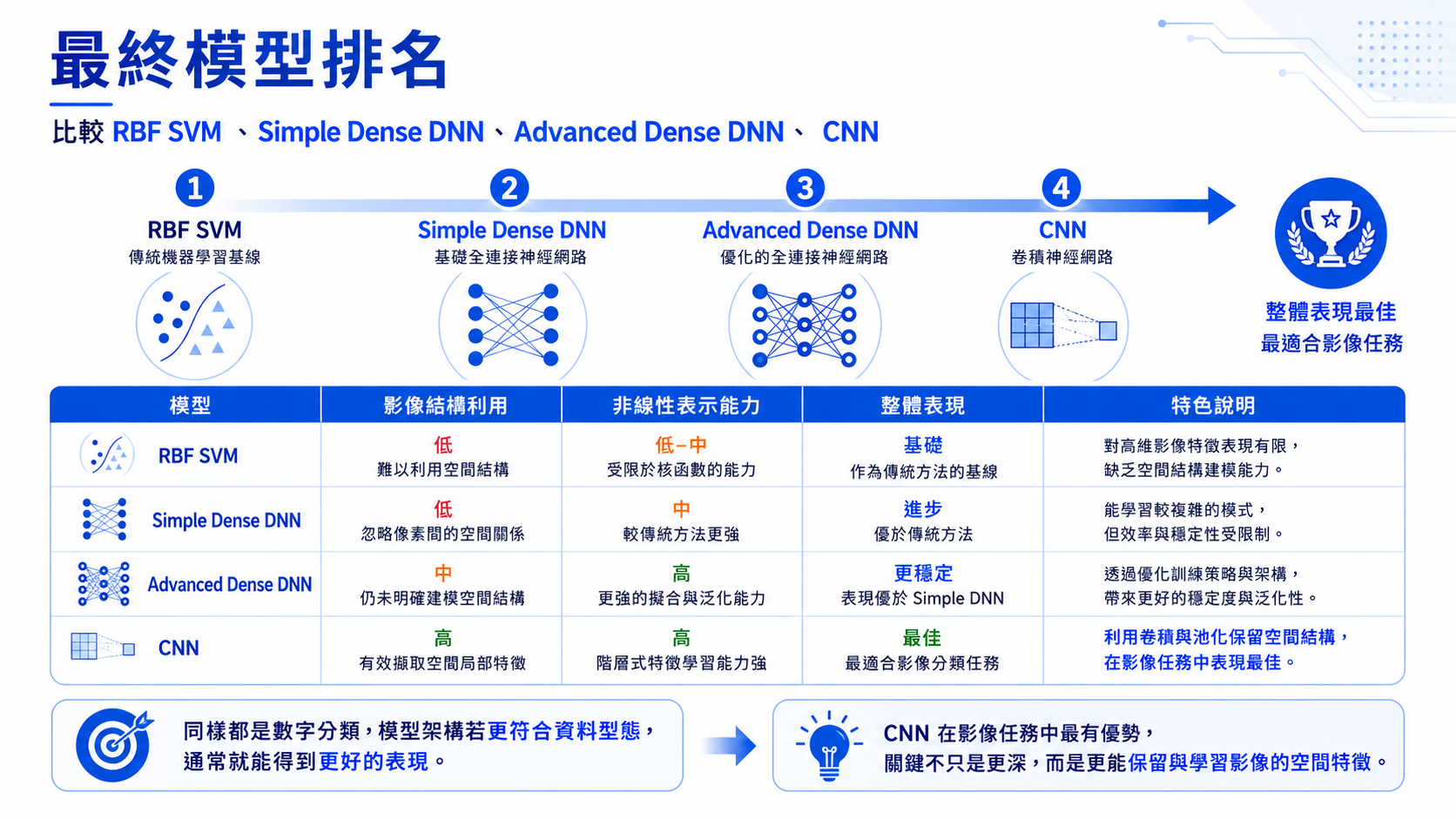
| 簡單手寫數字 | SVM RBF | 高準確率 | 高準確率 |
| SVHN | SVM RBF raw pixels | 0.6947 | 0.5170 |
| SVHN | Simple Dense DNN | 0.7476 | 0.6540 |
| SVHN | Optimized Dense DNN | 0.8501 | 0.6973 |
| SVHN | Small CNN | 0.9814 | 0.9263 |
Note
簡單手寫數字資料集與 SVHN 是不同資料集,不能直接拿準確率做公平排行。這裡的比較重點是教學脈絡:同樣是數字分類,當資料從乾淨小圖變成真實場景影像時,模型需要更強的表示學習能力。
2. 每個模型學到的重點
2.1 SVM baseline
SVM 讓我們理解傳統機器學習的基本流程:資料前處理、特徵標準化、模型訓練、模型評估。它在簡單手寫數字資料上表現很好,因此很適合作為入門 baseline。
2.2 SVHN SVM
當資料換成 SVHN 後,同樣是數字分類,任務難度明顯提高。SVM 使用 raw pixels 時測試準確率下降,這說明真實影像任務通常需要更好的特徵表示,而不只是更換分類器。
2.3 Simple Dense DNN
Dense DNN 能從資料中學習非線性表示,因此比 SVM raw pixels 有明顯改善。不過它仍然把圖片攤平成一維向量,沒有充分利用影像的空間結構。
2.4 Optimized Dense DNN
加入 LeakyReLU、learning rate schedule 與 EarlyStopping 後,Dense DNN 表現繼續提升。但 train/test gap 仍提醒我們,單純優化 Dense DNN 仍可能遇到上限。
2.5 CNN
CNN 保留影像空間結構,透過卷積擷取局部特徵,因此在 SVHN 上取得最好的測試準確率。這也是 CNN 長期成為影像辨識主流架構的主要原因。
3. 本系列的核心觀念
本系列希望建立的不是單一模型技巧,而是一條完整的思考路線:
在實務專案中,這條路線也很常見。面對一個新問題時,我們通常不會一開始就使用最複雜的模型,而是先建立 baseline,再根據資料特性與錯誤模式逐步改善。
4. 學習建議
完成本系列後,可以繼續嘗試:
- 改變 CNN 層數與 filter 數量。
- 加入資料增強。
- 使用 BatchNormalization。
- 比較不同 optimizer。
- 嘗試 transfer learning。
- 使用自己的圖片資料建立分類器。
5. 結論
神經網路的重點不只是「模型比較深」,而是能從資料中學到更好的表示方式。對影像任務來說,CNN 的優勢來自於它能保留圖片的空間結構,並從局部區域中抽取有意義的特徵。
從 SVM 到 DNN,再到 CNN,我們看到的是同一個任務在不同資料複雜度與模型能力下的變化。這也是學習深度學習時最重要的核心觀念之一。